Уникальная установка КИС ВТД
Уникальная установка КИС ВТД
Испытательный полигон для наземных РТК. (массой до 3000 кг)

- Руководитель: директор-главный конструктор Лопота Александр Витальевич.
- Ответственный: заместитель руководителя по научной работе Даляев Игорь Юрьевич. igor@rtc.ru
- Фактический адрес размещения КИС РТК: 194064, г. Санкт-Петербург, Тихорецкий проспект, 21. ЦНИИ РТК.
Полное наименование уникальной установки: «Испытательная установка для исследования сложных космических объектов в условиях имитации невесомости (КИС РТК)» (КИС РТК).
Год создания – 1984.
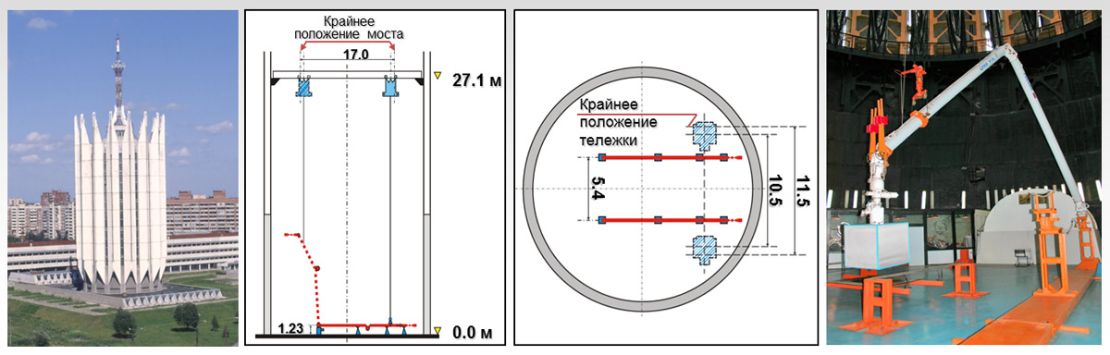
КИС РТК – это отдельное здание в форме башни высотой 72 м и диаметром 30 м, внутри которого находится свободное помещение диаметром 24 м, идеально соответствующее требованиям эксплуатируемой установки, в состав которой входят лифт, монтажный кран и трехмерная система обезвешивания.
Исследованы возможности восстановления трехмерного портрета сцены по изображениям с разнесенных телевизионных камер, определены условия работоспособности метода, выявлены проблемы возникновения неопределенности, предложены пути их преодоления, предложен и разработан новый метод восстановления трехмерного портрета сцены за счет лазерной веерной подсветки с поперечным сканированием. Создана компьютерная модель реального многозвенного манипулятора, проверена ее адекватность поведению реального объекта, что позволяет осуществлять реализацию виртуального тренажера. Исследована система активной компенсации сил сопротивления обезвешивания. Исследованы узлы и элементы робототехнической системы модульного построения для обслуживания космических объектов. Аналитически решена обратная кинематическая задача для космического манипулятора. Создано унифицированное программное обеспечение системы управления космическим манипулятором.
| Наименование | Изготовитель | Год выпуска | |
| Система бортовых манипуляторов | ЦНИИ РТК, Россия | 1988 | |
| Система разгрузочных приводов манипулятора Назначение: имитация условий невесомости для работы космических манипуляторов в трехмерном пространстве Основные характеристики: - грузоподъёмность управляемого крана (системы разгрузки) – до 1000 кг - высота подъема – 0…24 м - скорость перемещения – 0,5 м/с - чувствительность к усилию – 0,4 кг | Завод тяжелого подъемо-транспортного оборудования, Россия | 1988 |
Исследованы возможности восстановления трехмерного портрета сцены по изображениям с разнесенных телевизионных камер, определены условия работоспособности метода, выявлены проблемы возникновения неопределенности, предложены пути их преодоления, предложен и разработан новый метод восстановления трехмерного портрета сцены за счет лазерной веерной подсветки с поперечным сканированием. Создана компьютерная модель реального многозвенного манипулятора, проверена ее адекватность поведению реального объекта, что позволяет осуществлять реализацию виртуального тренажера. Исследована система активной компенсации сил сопротивления обезвешивания. Исследованы узлы и элементы робототехнической системы модульного построения для обслуживания космических объектов. Аналитически решена обратная кинематическая задача для космического манипулятора. Создано унифицированное программное обеспечение системы управления космическим манипулятором.
| Наименование | Изготовитель | Год выпуска | |
| Система бортовых манипуляторов | ЦНИИ РТК, Россия | 1988 | |
| Система разгрузочных приводов манипулятора Назначение: имитация условий невесомости для работы космических манипуляторов в трехмерном пространстве Основные характеристики: - грузоподъёмность управляемого крана (системы разгрузки) – до 1000 кг - высота подъема – 0…24 м - скорость перемещения – 0,5 м/с - чувствительность к усилию – 0,4 кг | Завод тяжелого подъемо-транспортного оборудования, Россия | 1988 |


Специальная оценка условий труда/ Программное обеспечение/ Документы/ Противодействие коррупции / Дипломы и награды
Для повышения удобства сайта и экономии времени посетителей мы используем cookies. Оставаясь на сайте, Вы соглашаетесь на обработку файлов cookie. Подробности в положении об обработке персональных данных пользователя сайта.
194064, Россия, Санкт-Петербург, Тихорецкий пр., 21
+7 (812) 552-01-10
rtc@rtc.ru
© 1998-2025 ЦНИИ РТК. Все права защищены